Nodes Browser
ComfyDeploy: How ComfyUI-RK-Sampler works in ComfyUI?
What is ComfyUI-RK-Sampler?
Batched Runge-Kutta Samplers for ComfyUI
How to install it in ComfyDeploy?
Head over to the machine page
- Click on the "Create a new machine" button
- Select the
Editbuild steps - Add a new step -> Custom Node
- Search for
ComfyUI-RK-Samplerand select it - Close the build step dialig and then click on the "Save" button to rebuild the machine
ComfyUI-RK-Sampler

Batched Runge-Kutta Samplers for ComfyUI
Supports most practical Explicit Runge-Kutta (ERK) methods.
Tested on SD1.5, SDXL, and SD3.
Features
- Parallel ODE solvers for fast batch processing
- Explicit and Embedded Explicit Runge-Kutta methods
- PID controller for adaptive step sizing with tunable settings
- Scheduled controller for fixed step sizing (determined by the given $\sigma$ schedule)
Installation
ComfyUI-Manager
ComfyUI Manager Menu > Custom Nodes Manager > ComfyUI-RK-Sampler > Install
Manual installation
From
ComfyUI/custom_nodesand ComfyUI virtual environment:
git clone https://github.com/wootwootwootwoot/ComfyUI-RK-Sampler.git
pip install torchode
Usage
From
Add Node:
sampling > custom_sampling > samplers > Runge-Kutta Sampler
Best defaults
- These methods support normal as well as high CFG scales, but the results may depend on the specific model.
- For SDXL, the best results I got were from CFG scales between 7-35.
- If you don't know the right step count or CFG scale:
- Try the
adaptive_pidcontroller with the base CFG and increment it until the results get worse. - Tune the CFG to the desired output.
- Try the
fixed_scheduledcontroller:- Use the
Align Your Stepsscheduler. - Set the scheduler's step count to be the same as the number of steps taken by the
adaptive_pidcontroller. - Leave the CFG scale unchanged.
- Use the
- Tune the scheduler step count.
- Try the
- When using
adaptive_pidoradaptive_scipycontrollers:- Set
log_absolute_toleranceto -3.5:- Decrease it to set more strict tolerances (better results) in exchange for slower inference times.
- Increase it to set less strict tolerances (worse results) in exchange for faster inference times.
- Set
log_relative_toleranceto be 1-2 more thanlog_absolute_tolerance.
- Set
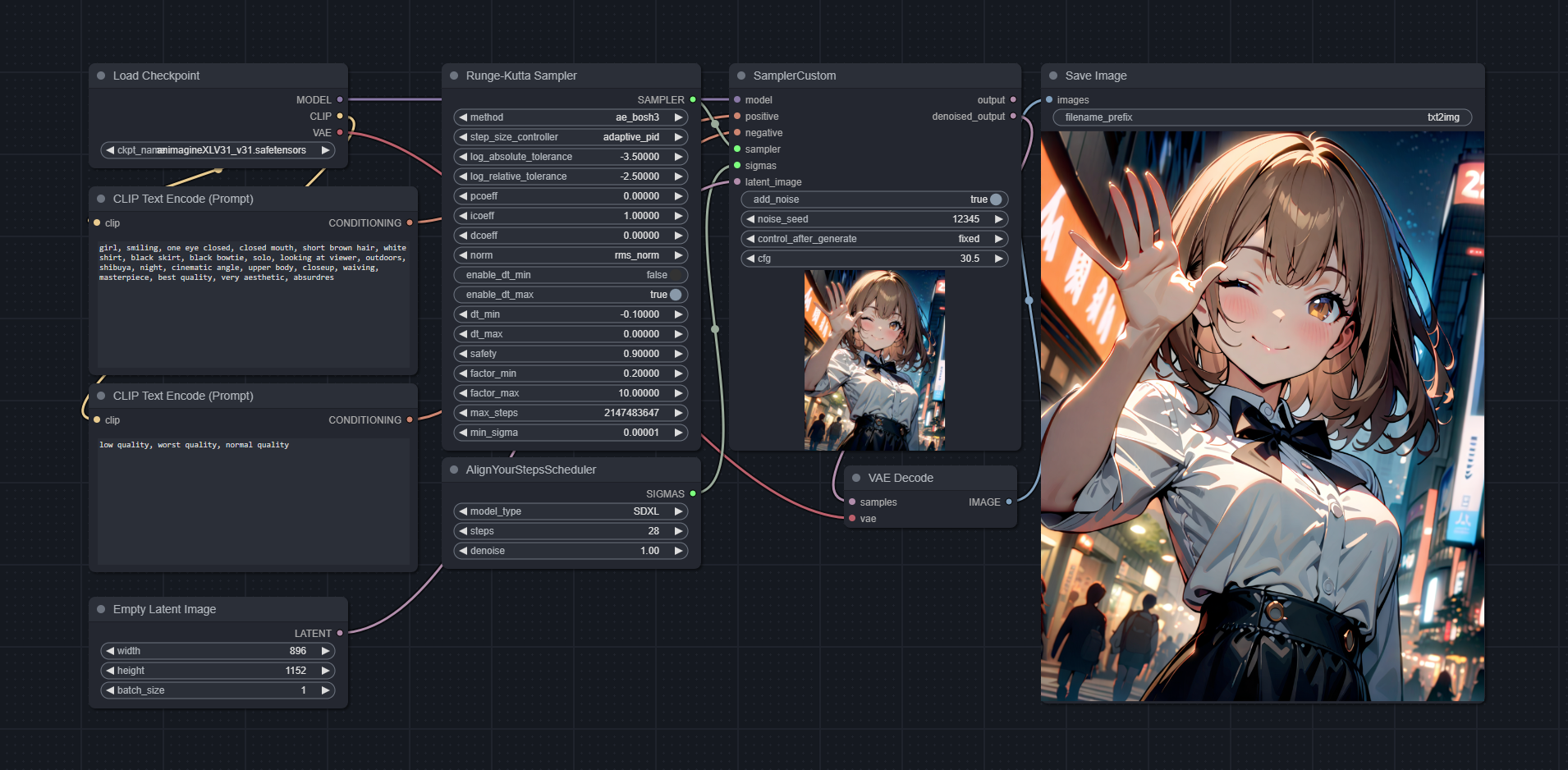
Adaptive step size
method: ae_bosh3
step_size_controller: adaptive_pid
log_absolute_tolerance: -3.5
log_relative_tolerance: -2.5
pcoeff: 0
icoeff: 1
dcoeff: 0
norm: rms_norm
enable_dt_min: false
enable_dt_max: true
dt_min: -0.1
dt_max: 0
safety: 0.9
factor_min: 0.2
factor_max: 10
max_steps: 2147483647
min_sigma: 1e-5
cfg: 7-35
Fixed step size
method: fe_ralston3
step_size_controller: fixed_scheduled
scheduler: Align Your Steps
steps: 28-150
cfg: 7-35
Choose a step size controller
step_size_controller: Controller to determine the step size taken on each sampling step.
adaptive controllers: Automatically determines the step size(s). The scheduler choice and scheduler step count does not matter since they only use the start and end timesteps.
fixed controllers: Uses the step size(s) provided by the scheduler. Works like a normal non-adaptive sampler in this case.
- adaptive_pid: A proportional–integral–derivative (PID) controller. Works with
a-class methods. - fixed_scheduled: A controller that uses the $\sigma$ (timestep) schedule from the scheduler. Works with
a-class andf-class methods. - adaptive_scipy: A basic integral controller wrapped from scipy. Works with
s-class methods.
Choose a method
method: Determines the solver method used.
a, f, and s classes
a= adaptive,f= fixed,s= scipy,e= explicit- Use
a-class methods with either:adaptive_pidfor automatically determined step sizes/count.fixed_scheduledfor scheduler determined step sizes/count.
- Use
f-class methods withfixed_scheduled. - Use
s-class methods withadaptive_scipy.
Recommended methods
- Try
ae_bosh3,ae_dopri5, andae_fehlberg5with theadaptive_pidstep size controller. - Try
fe_ralston3,ae_bosh3, andfe_ssprk3with thefixed_scheduledstep size controller.
Quality ranking
Tested on RTX3090, SDXL, 896x1152, CFG=30, batch size 1, fixed_scheduled, Align Your Steps, 28 steps.
| Rank | Name | Method | Order | NFEs | Time |
| ----------- | ----------- | ----------- | ----------- | ----------- | ----------- |
| 1 | fe_ralston3 | Ralston | 3 | 3 | 23.08s |
| 2 | ae_bosh3 | Bogacki–Shampine | 3 | 3 | 23.03s |
| 3 | fe_ssprk3 | Strong Stability Preserving Runge-Kutta | 3 | 3 | 22.97s |
| 4 | fe_kutta4 | Runge-Kutta | 4 | 4 | 29.87s |
| 5 | fe_kutta_38th4 | Runge-Kutta (3/8-rule) | 4 | 4 | 30.10s |
| 6 | ae_dopri5 | Dormand–Prince | 5 | 6 | 44.03s |
| 7 | ae_fehlberg5 | Runge–Kutta–Fehlberg | 5 | 6 | 44.28s |
| 8 | ae_heun_euler2 | Heun–Euler | 2 | 2 | 15.87s |
| 9 | fe_kutta3 | Runge-Kutta | 3 | 3 | 22.83s |
| 10 | ae_ralston2 | Ralston | 2 | 2 | 16.05s |
| 11 | ae_cash_karp5 | Cash-Karp | 5 | 6 | 44.47s |
| 12 | fe_ralston4 | Ralston | 4 | 4 | 29.69s |
| 13 | fe_euler1 | Forward Euler | 1 | 1 | 9.00s |
| 14 | fe_wray3 | van der Houwen and Wray | 3 | 3 | 22.96s |
| 15 | fe_heun3 | Heun | 3 | 3 | 23.13s |
| 16 | ae_tsit5 | Tsitouras | 5 | 6 | 43.90s |
| 17 | ae_midpoint2 | Explicit midpoint | 2 | 2 | 15.97s |
| 18 | ae_fehlberg2 | Runge–Kutta–Fehlberg | 2 | 3 | 23.23s |
| 19 | ae_dopri8 | Dormand–Prince | 8 | 13 | 94.10s |
Explicit methods from scipy.integrate
These methods are wrapped implementations of explicit solvers from scipy.integrate.
| Name | Method | Order | NFEs |
| ----------- | ----------- | ----------- | ----------- |
| se_RK23 | Runge-Kutta | 3 | 3 |
| se_RK45 | Runge-Kutta | 5 | 6 |
| se_DOP853 | Dormand-Prince | 8 | 12 |
Solver settings
| Option | Applies to | Description |
| ----------- | ----------- | ----------- |
| method | adaptive_pid, fixed_scheduled, adaptive_scipy | Solver method. |
| step_size_controller | adaptive_pid, fixed_scheduled, adaptive_scipy | Step size controller. |
| log_absolute_tolerance | adaptive_pid, adaptive_scipy | $log_{10}$ of the threshold below which the solver does not worry about the accuracy of the solution since it is effectively 0. log_absolute_tolerance must be less than or equal to log_relative_tolerance. |
| log_relative_tolerance | adaptive_pid, adaptive_scipy | $log_{10}$ of the threshold for the relative error of a single step of the integrator. |
| pcoeff | adaptive_pid | Coefficients for the proportional term of the PID controller. |
| icoeff | adaptive_pid | Coefficients for the integral term of the PID controller. P/I/D of 0/1/0 corresponds to a basic integral controller. |
| dcoeff | adaptive_pid | Coefficients for the derivative term of the PID controller. |
| norm | adaptive_pid, adaptive_scipy | Normalization function for error control. Step sizes are chosen so that norm(error / (absolute_tolerance + relative_tolerance * y)) is approximately one. |
| enable_dt_min | adaptive_pid, adaptive_scipy | Enable clamping of the minimum step size to take to dt_min. |
| enable_dt_max | adaptive_pid, adaptive_scipy | Enable clamping of the maximum step size to take to dt_max. |
| dt_min | adaptive_pid, adaptive_scipy | The dt_min value to clamp to. Since we are solving a reverse-time ODE, this value should be negative. dt_min must be less than or equal to dt_max. |
| dt_max | adaptive_pid, adaptive_scipy | The dt_max value to clamp to. Since we are solving a reverse-time ODE, this value should be negative. Clamped to 0 by default to force a monotonic solve. |
| safety | adaptive_pid, adaptive_scipy | Multiplicative safety factor. |
| factor_min | adaptive_pid, adaptive_scipy | Minimum amount a step size can be decreased relative to the previous step. factor_min must be less than or equal to factor_max. |
| factor_max | adaptive_pid, adaptive_scipy | Maximum amount a step size can be increased relative to the previous step. |
| max_steps | adaptive_pid, adaptive_scipy | Maximum amount of steps an adaptive step size controller is allowed to take. Taking more steps than max_steps will return an error. |
| min_sigma | adaptive_pid, adaptive_scipy | Lower bound for $\sigma$ to consider the IVP solve to be complete. |
Comparison
Related projects
This extension improves upon ComfyUI-ODE by adding support for parallel processing, more controllability, high-quality live previews, a PID controller, and support for more fixed and adaptive step size solvers.
Speed
Tested on RTX3090, SDXL, 896x1152, CFG=30, adaptive_pid 0/1/0, ae_bosh3 (ComfyUI-RK-Sampler) / bosh3 (ComfyUI-ODE), log_absolute_tolerance=-3.5, log_relative_tolerance=-2.5.
| Batch size | ComfyUI-RK-Sampler | ComfyUI-ODE |
| ----------- | ----------- | ----------- |
| 1 | 1m2s | 1m6s |
| 2 | 2m3s | 2m7s |
| 4 | 4m4s | 4m27s |
| 8 | 7m39s | 9m3s |
| 16 | 15m29s | 17m22s |
| 32 | 30m18s | 36m34s |
Explanation
From Wikipedia:
In numerical analysis, the Runge–Kutta methods are a family of implicit and explicit iterative methods, which include the Euler method, used in temporal discretization for the approximate solutions of simultaneous nonlinear equations. These methods were developed around 1900 by the German mathematicians Carl Runge and Wilhelm Kutta.
The Runge-Kutta methods are a family of methods used for solving approximate solutions of ODEs by iterative discretization (or, if in diffusion terms, by sampling).
Runge-Kutta methods generally have less discretization error than standard diffusion sampling methods, allowing for the use of high CFG scales (within practical limits) to create high-quality results without artifacts.
Conditions for new solvers and methods
- No implicit solvers:
- Implicit solvers require root-finding.
- This means a backward pass through the model has to be ran to compute the Jacobian.
- The Jacobian is then used during LBFGS optimization.
- This is also very costly in terms of compute and memory usage.
- No non-RK methods:
- This would cut off linear multistep methods like Adams-Bashforth or Adams predictor-corrector.
- From my testing, RK methods perform better, even for explicit RK vs. predictor-corrector linear multistep.
- No duplicate methods:
- If two methods have different coefficients, they aren't duplicates.
- SciPy methods have different coefficients and implementations.
Changelog
24/07/24
- Added solver settings for
adaptive_scipy. - Progress bar improvements:
- Adaptive solvers now show the number of steps taken.
- Accurate $\sigma$ info is now displayed.
- Bugfixes and small refactors.
23/07/24
- Installation from ComfyUI-Manager.
- Bugfixes and small refactors.
22/07/24
- Added wrappers for explicit solvers from
scipy.integrate:se_RK23se_RK45se_DOP853
- Some notes about the wrapped scipy solvers:
- To use the new solvers, select
adaptive_scipyas the step size controller. - No fixed step size controllers are available for wrapped scipy methods.
- These methods do not support parallel IVP solve, meaning the batch elements are processed sequentially.
- Implicit solvers from
scipy.integratewere skipped as the root finding step takes too long.
- To use the new solvers, select
- The refactors from this update can cause the results to differ from the previous version. This is due to changes in floating point precision casting and operation orders.